4th December 2015 1,000-fold increase in 3-D imaging resolution A new system developed by MIT can increase the resolution of conventional 3-D imaging devices by 1,000 times.
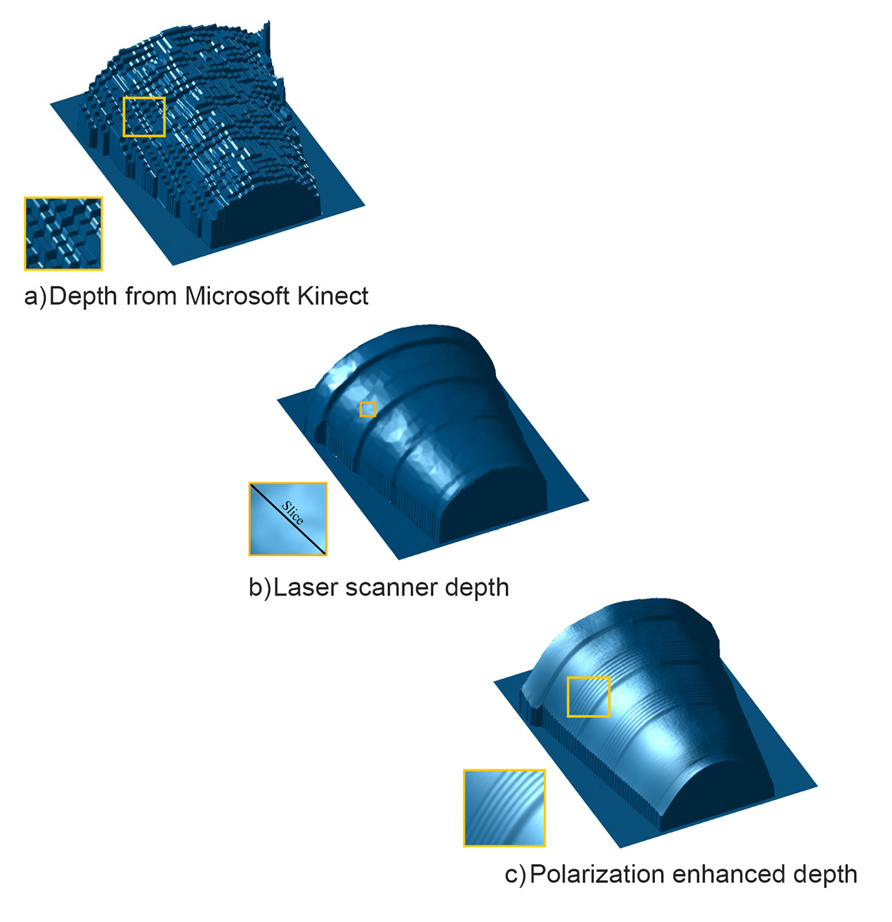
Researchers at the Massachusetts Institute of Technology (MIT) have shown that by exploiting the polarisation of light – the physical phenomenon behind polarised sunglasses and most 3-D movie systems – they can increase the resolution of conventional 3-D imaging devices by up to 1,000 times. This technique could lead to high-quality 3-D cameras built into smartphones, or the ability to snap photos of objects and then use 3-D printing to produce accurate replicas. Further out, the work may also improve the ability of driverless cars in rain, snow and other reduced visibility conditions. "Today, they can miniaturise 3-D cameras to fit on cellphones," says Achuta Kadambi, a PhD student in the MIT Media Lab and one of the system's developers. "But they make compromises to the 3-D sensing, leading to very coarse recovery of geometry. That's a natural application for polarisation, because you can still use a low-quality sensor, and adding a polarising filter gives you something that's better than many machine-shop laser scanners." The researchers have described their new system – which they call Polarised 3D – in a paper to be presented at the International Conference on Computer Vision later this month. Their experimental setup consisted of a Microsoft Kinect – which gauges depth using reflection time – combined with an ordinary polarising photographic lens placed in front of its camera. In each experiment, they took three photos of an object, rotating the polarising filter each time, and their algorithms compared the light intensities of the resulting images.
On its own, at a distance of several metres, the Kinect can resolve physical features as small as a centimetre or so across. But with the addition of the polarisation information, the hybrid system was able to resolve features in the range of tens of micrometres: one-thousandth the size. For comparison, they also imaged several of their test objects with a high-precision laser scanner, which requires that the object be inserted into the scanner bed. Polarised 3D still offered the higher resolution. A mechanically rotated polarisation filter would probably be impractical in a cellphone camera, but grids of tiny polarisation filters that can overlay individual pixels in a light sensor would work. The paper also offers the tantalising prospect that polarisation systems may help in the development of self-driving cars. Experimental self-driving vehicles of today are reliable under normal illumination conditions – but their vision algorithms go haywire in rain, snow, or fog, due to water particles in the air scattering light in unpredictable ways. Polarised 3D could exploit information contained in interfering waves of light to handle scattering. Yoav Schechner, associate professor of electrical engineering, comments on the research: "The work fuses two 3-D sensing principles, each having pros and cons. One principle provides the range for each scene pixel – the state of the art for most 3-D imaging systems. The second principle does not provide range. On the other hand, it derives the object slope, locally. In other words, per scene pixel, it tells how flat or oblique the object is." "The work uses each principle to solve problems associated with the other principle," Schechner explains. "Because this approach practically overcomes ambiguities in polarisation-based shape sensing, it can lead to wider adoption of polarisation in the toolkit of machine-vision engineers."
Comments »
|